 |
「二足歩行」
・ 二足歩行については以前にも2回載せています。
二足歩行を考える木製 「ロボ君」 2003.4.
坂道を歩いて降りる「ペンギン」 2004.3.
・ 私たちは簡単に歩いているのですが、機械的な仕組み
となると簡単ではありません
・ 原動力
以前のものと同じように歩くための原動力は重力です。
・ 二足歩行のしくみについて
出来る限り工作、操作しやすいしくみを考えました。
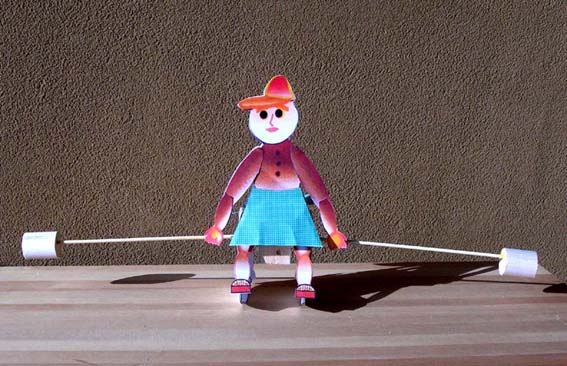
・ 約5度の斜面を1歩約3cmでカタカタと歩く。
|
今回は、小学生でも工作が可能なように素材は木材、紙を主体として製作しています。
二足歩行のしくみについては 、前回に説明しているとおりですが、重心の位置や足の
支点位置、足底の曲線などが最も難しいところです。
試行錯誤の上なんとか設計図を仕上げ、試作することが出来ました。
ロボ君については、形を紙に書いて切り抜き、貼り付けただけですが、動物や乗り物
にかえたりして工作できると思います。
足底を下駄履きにしても何とか歩行することに成功しましたが、木材を使ったりしている
ので小学生には工作、調整が少し難しすぎるかと思います。
|
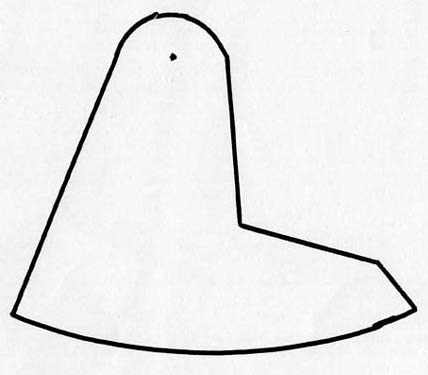 |
足の形と支点
支点部に取り付ける軸受けは
ベニヤ板(5mm)を使用しました。
足の材料は厚紙使用 |
